

Примечания и ссылки
- Карел Чапек ( перевод Ян Рубес), RUR: Универсальные роботы Россум , Editions de La Difference,2011 г., 220 с. ( ISBN 978-2-7291-1922-5 и 2-7291-1922-1 )
- Макс Фасмер, Этимологический словарь русского языка , «As Russisches Etymologisches Wörterbuch», Гейдельбергский университет, 1950–1954 гг.
- Жан-Клод Хёден, Искусственные существа: от автоматов к виртуальным мирам , 2008 г.
- (in) « Саудовская Аравия предоставляет гражданство говорящему роботу по имени София, который может быть слишком светским, чтобы быть саудовцем » , Newsweek ,26 октября 2017 г.
- (in) Тейлор Хэтмейкер , « Саудовская Аравия даровала гражданство роботу по имени София » , TechCrunch ,26 октября 2017 г.
- (en-US) Сэм Барсанти , « Саудовская Аравия делает ужасающий шаг в будущее, предоставляя роботу гражданство » , The AV Club ,26 октября 2017 г.
Этимология
Термин робот происходит из славянских языков и образован от корня планот , работа (работа по-русски), что означает работа, рутинная работа, которую мы находим в слове Раб (раб), раб по-русски. Это радикальное присутствие в других славянских языках (например, worker = robotnik на польском, worksnіk на белорусском, pracovník на чешском) происходит от индоевропейского * orbho-, которое также дало начало готическому Arbese, означающему потребность, необходимость , он — тот же источник Немецкий Арбайт , работай .
Первоначально его использовал чехословацкий писатель Карел Чапек в своей пьесе R. UR (Универсальные роботы Россум) , написанной в 1920 году . Эта пьеса была впервые исполнена на публике в Национальном театре в Праге на январь 25 , . Хотя Карела Чапека часто считают изобретателем этого слова, он сам называл своего брата Йозефа , художника и писателя, настоящим изобретателем этого слова.
Некоторые утверждают, что слово « робот» впервые было использовано в коротком произведении « Опилец » Йозефа Чапека («Пьяница») , опубликованном в сборнике Лелио в 1917 году . Тем не менее, по мнению Общества братьев Чапеков в Праге, это было бы неверно. Слово используется в Opilec является автоматом , тогда как в рублях , что слово робот появился в первый раз.
В то время как «роботы» Карела Чапека были искусственными органическими людьми, слово « робот» было заимствовано для обозначения «механических» людей. Термин андроид может означать и то, и другое, в то время как термин киборг («кибернетический организм» или «бионический человек») относится к существу, состоящему из органических и искусственных частей.
Что касается термина « робототехника» , то он был введен в литературу в году Исааком Азимовым в его книге « Обход» . Он устанавливает «три правила робототехники», которые позже станут тремя законами робототехники в произведениях научной фантастики .
Типы роботов:
Промышленные роботы
– выполняют различные производственные задачи. Всегда есть устройство управления – контроллер, может включать в себя манипулятор, сервопривод, различные сенсоры, пневмоцилиндры и многое другое. Все зависит от того, что делают на этом производстве. Например — склады, логистика здесь требуются конвейеры, штабелеры и т.д. Выполняют различные технологические операции, перемещение предметов, обработку материалов.
 Промышленные роботы для технологических процессов
Промышленные роботы для технологических процессов
Медицинские роботы
– наиболее известный хирургический робот «Да Винчи». Он управляется несколькими операторами хирургами. При его помощи проводят высокоточные операции. Прибор представляет собой управляемый манипулятор. Обычно медицинские роботы совсем не похожи на людей. Также есть роботы, которые выполняют отдельные функции, например, массаж или внутривенные инъекции, терапевтические функции и прочее. Для более точечных операций идет разработка нано-роботов. Они смогут вводиться внутрь с помощью капельницы, шприца или другим способом.
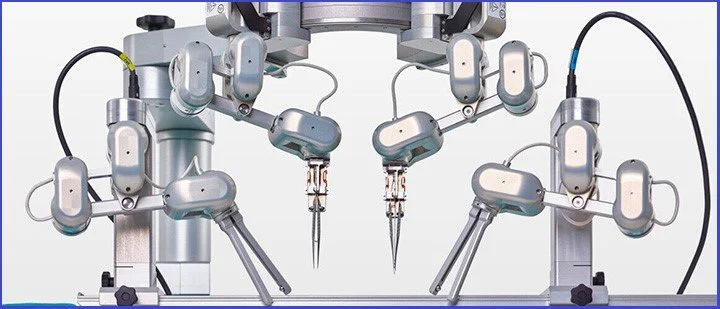 Управляемый манипулятор робот хирург
Управляемый манипулятор робот хирург
Бытовые роботы
– облегчают жизнь человеку. Это роботы, выполняющие функции секретаря, уборки помещений, роботы животные. Например робот-собачка, способная выполнять некоторые команды, роботы-пылесосы и другие.
Робот, которые обеспечивают безопасность.
— широко используются силовыми структурами. Это системы контроля доступом, автоматические устройства пожаротушения. МЧС и полиция используют беспилотники-дроны, подводных роботов для предотвращения пожаров и глубоководных работ.
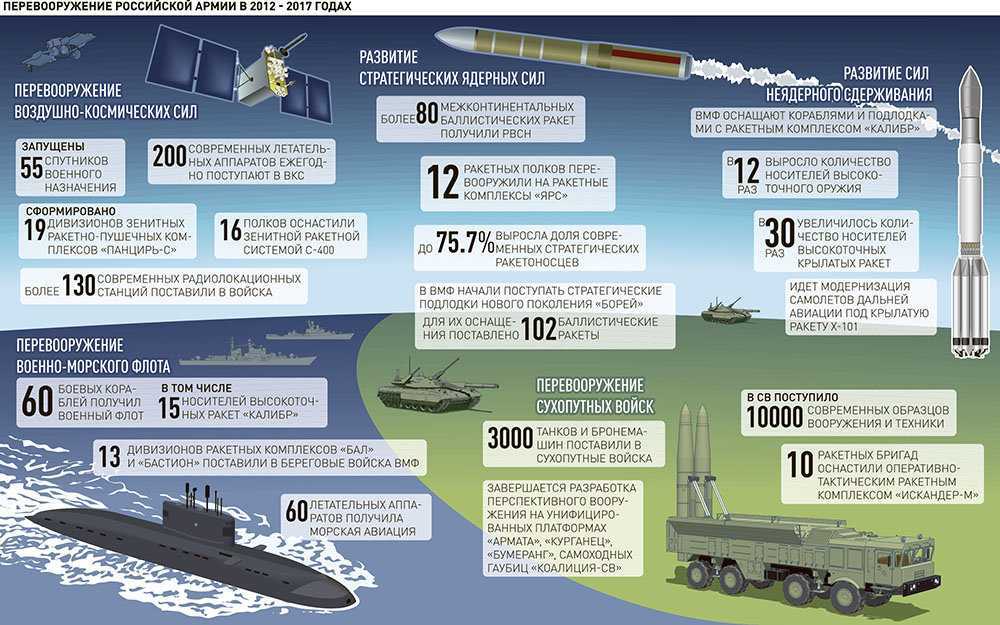
Боевые роботы
— являются как правило дистанционно управляемыми и предназначены для замены человека в особо опасных и боевых ситуациях. Это роботы-минеры, роботы-саперы, роботы разведчики. Автономные боевые роботы пока находятся в стадии разработки.

Боевые роботы для арии
Роботы учёные
– постепенно начинают использоваться для научных исследований и разработок. Для них используют все более совершенные алгоритмы управления. Роботы уже в состоянии проводить научные эксперименты, опыты, анализировать различные процессы, делать прогнозы и выдвигать теории. Эти роботы могут работать без перерыва, у них нет амбиций, они не могут обманывать и утаивать информацию. Также роботы лишены субъективной оценки своей работы.
Робот учитель
– может выполнять многие задачи, которые выполняет современный учитель. Он может читать вслух, общаться на многих языках, выдавать задания. Но пока не может распознавать эмоции человека, думать, как человек. Такой робот-учитель лишен индивидуального подхода к учащимся. У него сложности с мотивацией учеников и управлением классом.
Мы видим что различных типов роботов достаточно много и тому что такое робот можно дать много определений. Но пока у всех роботов отсутствует эмоциональная составляющая, пока это только управляемые программируемые механизмы. Этот перечень роботов далеко не полный. Каждый тип роботов также включает в себя множество моделей. С каждым годом мир роботов становится все больше и разнообразнее.
Расцвет квантовых технологий
В третьем десятилетии, конечно, покажут себя квантовые технологии. Будем надеяться на создание работоспособного универсального квантового процессора. Один специалист из «Сколкова» привел интересное сравнение — о том, что такое квантовые технологии сейчас. Представьте себе развитие воздухоплавания: от крыльев, которые моделировал Леонардо да Винчи, до сверхзвукового самолета. Квантовые технологии на их сегодняшнем этапе развития находятся на уровне шара Монгольфье: оно уже летит, но все еще никому не нужно. Да, можно взять квантовый процессор и на нем поиграться, особенно если это не универсальный вычислитель, а «находитель экстремумов» методом так называемого квантового отжига. Но пока это только исследовательская вещь. Однако в третьем десятилетии XXI века они, конечно же, должны завоевать свою нишу.
С приходом квантовых компьютеров неизбежно обрушится вся система защиты информации, которая есть в мире. Потому что большинство алгоритмов защиты информации построены на проблеме факторизации чисел — разложения на простые множители. Для очень больших чисел электронный компьютер решает эту задачу за время, сравнимое с возрастом Вселенной, а вот квантовый компьютер будет делать это за секунды. В первую очередь пострадают наименее защищенные финансовые рынки и банковские системы. Но тут же будет дан импульс развитию квантового шифрования, и вскоре квантовое шифрование догонит компьютер, баланс восстановится. Это произойдет в ближайшие годы, и за этим надо следить.
Какие знания необходимы для создания робототехники?
«Это будет самая большая волна»
— Альберт Анатольевич, Россия приближается к пику пандемии. Таких цифр по заболевшим не было за всю историю COVID-19. На ваш взгляд, несмотря на такие показатели, нет повода для паники?
— Паниковать нельзя никогда. Но нужно четко следовать плану, стараться выполнять все рекомендации. Сократить контакты, тем, кто не вакцинировался — вакцинироваться, тем, кто вакцинировался более 6 месяцев назад — пройти ревакцинацию. Таким образом, нужно максимально защитить себя и своих близких.
— Сейчас болеют практически все поголовно, в том числе и переболевшие, и вакцинированные…
— Но если у человека есть иммунитет, выработавшийся в результате болезни или после прививки, то с высокой долей вероятности он переболеет в легкой форме. Я знаю людей, которые и переболели, и вакцинировались, но все равно инфицировались. Однако все переносят заболевание в легкой форме. К счастью, несмотря на взрывной рост по количеству выявленных новых случаев, уровень госпитализаций растет гораздо медленнее. А если состояние пациента все же требует госпитализации — это в основном не вакцинированные и не переболевшие.
— По вашим ощущениям нынешняя волна будет самой масштабной?
— Мне кажется, это будет самая большая волна. Это как в ситуации с землетрясением. Сначала происходит само землетрясение, а потом отголоски — афтершоки (или повторные толчки).
Сейчас мы испытываем, условно говоря, основное землетрясение, а потом последуют афтершоки. И многое будет зависеть от того, насколько вакцины будут модернизированы, появятся ли назальные вакцины, вакцины против новых штаммов, насколько люди будут ревакцинироваться. А вероятность появления новых штаммов предсказать довольно сложно.
Пример устройства робота — элементы и конструкция
Каждый робот состоит из следующих базовых компонентов:
- Рама или тело робота;
- Блок управления;
- Манипуляторы;
- Ходовая часть.
Тело/рама: Тело, или рама, робота может иметь любую форму и размер. Изначально, тело/рама обеспечивает конструкцию робота. Большинство людей знакомы с человекоподобными роботами, используемыми для съемок кинофильмов, но в действительность большинство роботов не имеют ничего общего с человеческим обликом. (Робонафт НАСА, представленный в предыдущем разделе, является исключением)








Как правило, в проекте робота внимание уделяется функциональности, а не внешности.
Система управления: Система управления робота является эквивалентом центральной нервной системы человека. Она предназначена для координирования управления всеми элементами робота
Датчики реагируют на взаимодействие робота с внешней средой. Ответы датчиков отправляются в центральный процессор (ЦП). ЦП обрабатывает данные с помощью программного обеспечения и принимает решения на базе логики. То же самое происходит при вводе пользовательской команды.
Манипуляторы: Для выполнения задачи большинство роботов взаимодействует с внешней средой, а также окружающим миром. Иногда требуется перемещение объектов внешней среды без непосредственного участия со стороны операторов. Манипуляторы не являются элементом базовой конструкции робота, как его тело/рама или система управления, то есть робот может работать и без манипулятора. В настоящем учебном курсе акцент делается на тему манипуляторов, особенно блок 6.
Ходовая часть: Хотя некоторые роботы могут выполнять поставленные задачи, не изменяя свое местоположение, зачастую от роботов требуется способность перемещаться из одного места в другое. Для выполнения данной задачи роботу необходима ходовая часть. Ходовая часть представляет собой приводное средство перемещения. Роботы-гуманоиды оснащены ногами, тогда как ходовая часть практически всех остальных роботов реализована с помощью колес.
Робот может быть любых форм и размеров. Именно рама или тело робота является основой его конструкции и определяет внешний облик. Среднестатистический человек при слове «робот» представляет человекоподобное существо из металла. Этот образ навязан многочисленными фантастическими кинофильмами.
На самом же деле большинство роботов совершенно не похоже на человека. Главное для робота – это его функциональность, а не то, как он выглядит.
Контроль за работой робота осуществляется при помощи системы управления. Она включает в себя огромное количество датчиков, которые помогают технике взаимодействовать с внешним миром.
Система управления роботом предполагает целый набор алгоритмов, благодаря которым решаются те или иные задачи. В работе робота происходит постоянный обмен данными между датчиками и центральным процессором (ЦП). Алгоритмы и программное обеспечение создаются человеком.
Для физического контакта с объектами внешней среды используется манипулятор. Данный элемент не является обязательным. Как правило, манипулятор не является частью рамы/тела робота. Используется для решения конкретных задач в различных отраслях.
Ходовая часть робота также не является обязательной, и наличествует лишь у тех роботов, которым необходимо передвижение в пространстве. В качестве средств для перемещения чаще всего используются колеса.
Так что же такое робот?
Исходя из приведенных выше определений, если бы мы захотели чёткой однозначности понятий, мы могли бы пойти двумя путями:
- расширительное толкование: считать роботами вообще всё, что подходит хоть под какой-то из перечисленных признаков;
- ограничительное толкование: не признавать роботами вообще ничего, что не соответствует строго всем признакам.
В первом случае ситуация не сильно изменится, в сравнении с имеющимся положением дел. Всё равно сейчас робототехники, условно говоря, как хотят, так и называют свои и чужие разработки.
Думаю, надо честно признать, что на данный момент мы не сможем придумать бесспорное, устраивающее всех определение понятия «робот», которому, к тому же, все будут неукоснительно следовать. Да оно и не нужно! Иначе, разговаривая с не подкованными теоретически людьми (заказчиками, коллегами, знакомыми), мы вынуждены будем постоянно их поправлять: «Нет, это не робот. А вот это, да, кажется робот… Если я не ошибаюсь… Подождите, проверю…» Это утомительно и отвлекает от других дел, полезных.
Итак, во-первых. На уровне обиходного использования вполне можно согласиться с приведенной в начале статьи интуитивной трактовкой неспециалистами понятия «робот» — рукотворной (искусственно созданной) сущности (механического устройства или компьютерной программы), которая движется, функционирует (выполняет работу, производит вычисления) без непосредственного присутствия человека.
Во-вторых. Для себя, мощных робототехников, нам будет полезно знать несколько типовых признаков, характеризующих (но не всегда определяющих) робот:
- приводной механизм — обязательный признак;
- программное управление — обязательный признак;
- выполнение поставленных человеком задач — обязательный признак;
- некоторая (большая или меньшая) автономность — а этот признак размыт даже в своей постановке и отражает, скорее, стремление к автономности.
И при этом мы помним, что в других областях могут быть собственные определения понятия «робот», такие как вот это, родившееся в мире информационных технологий. Виртуальный мир — он вообще склонен переносить понятия из реального мира к себе, одновременно дополняя их своими, новыми смыслами.
Ну, и в-третьих. Для буквоедов и заядлых классификаторов приведём определение робота на основе взятого из ГОСТ, только немного исправленное:
Робот — программируемый исполнительный механизм, обладающий некоторой степенью автономности и движущийся внутри своей рабочей среды с целью выполнения задач по назначению.
Вот так. Пусть каждому будет своё, и все будут довольны.
В заключение, в качестве юмора, обращаю внимание на цитату, взятую эпиграфом к данной статье. Не кажется ли вам, что она очень забавно и точно отражает реальность? Действительно, на заводах работают манипуляторы, квартиры убирают пылесосы, в небе летают беспилотники, в космосе — спутники, а на Луну, планеты и астероиды высаживаются зонды, межпланетные станции и планетоходы
Роботы, на самом деле, гораздо раньше заняли место в нашей жизни, чем мы это заметили! Даже если их не называют роботами, имеет ли это для них значение? Нет, они просто делают свою работу
Так что пожелаем всяческих успехов разработчикам стандартов в их трудном и важном деле формулирования точных определений. Для нас же важнее делать нашу работу
К тому же, теперь мы немного ориентируемся и в терминологических дебрях.
- В связи с этим не могу не процитировать отрывок из ГОСТ Р 60.0.0.2-2016 «Роботы и робототехнические устройства. Классификация», раздел «4 Общие положения». Он того стоит: «В общем случае все устройства, принадлежащие к классу роботов,… подразделяются на две группы в зависимости от числа программируемых степеней подвижности и степени автономности: роботы (3.1) и робототехнические устройства (3.2). Однако в дальнейшем в настоящем стандарте и в других стандартах комплекса «Роботы и робототехнические устройства» термин «робот», если иное не оговорено особо, обозначает устройства, относящиеся к обеим этим группам, т.е. соответствующие как определению 3.1, так и определению 3.2.»
Это шедевр! В стандарте (!), устанавливающем классификацию (!!), сразу после введения терминологии (!!!) заявлено: классификация классификацией, а называть будем как хотим! - ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 «Роботы и робототехнические устройства. Термины и определения»
- См. .
- См. .
- См. , .
Полезные курсы, с которых стоит начать саморазвитие
Преимущества и недостатки[]
Роботы обладают следующими потенциальными преимуществами перед людьми:
- теоретическая бессмертность — если какая-то деталь робота изнашивается, её легко заменить новой;
- потенциальная приспособленность к любым условиям обитания, где материалы, из которых сделан робот, будут находиться в стабильном состоянии;
- легкость получения новых особей — можно собирать промышленным способом;
- легкость обучения — достаточно скопировать программу другого робота в нового;
- робота можно отключить, если он не нужен, и хранить в таком виде.
Однако пока у роботов по сравнению с людьми более проявляются недостатки:
- изготовление более-менее универсального и надёжного робота обходится слишком дорого;
- настоящий искусственный интеллект не создан.
Очевидно, вследствие технического прогресса цена робота, выполняющего один и тот же набор функций, должна снижаться. Поэтому следует ожидать исчезновения первого указанного недостатка со временем. Второй же недостаток — отсутствие искусственного интеллекта — вполне может оказаться непреодолимым хотя бы потому, что мы не знаем, как работает интеллект естественный, и не факт, что когда-либо узнаем.







Робот Asimo2
Основные компоненты робототехники
Корпус большинства роботов состоит из отдельных подвижных и неподвижных частей. Вот основные из них:
Внутренний контроллер. Каждый робот оснащен контроллером — компьютерной операционной системой. Контроллер — это мозг любого робота. Он содержит всю необходимую информацию для выполнения задач и указаний.
Источник энергии. Роботам необходим источник энергии. Одни работают от батарей. Другие оснащены фотоэлементами, которые преобразуют солнечный свет в энергию. Механические роботы заводятся с помощью пружинного механизма.
Дистанционное управление. Роботы, которые работают на других планетах, такие как марсоход, оборудованы внутренними контроллерами, но ими также можно управлять с Земли.
Сенсоры света и звука. С их помощью робот может распознавать свет, исходящий от объектов, определять звуковые волны. Эта функция помогает либо обходить различные предметы, либо идти к ним навстречу. Также в корпус робота может быть встроено устройство распознавания голоса, с помощью которого человек отдает машине устные приказы.
Датчики давления. Некоторые роботы оборудованы датчиками давления, которые имитируют осязание. У этих сенсоров два назначения: они сообщают роботу о том, что он ударился о какой-нибудь предмет и должен сменить направление движения, а также позволяют правильно захватить и поднять объект.
Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух. Перечислим все основные варианты приводов для робототехники:
- Двигатели постоянного тока: В настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов.
- Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определенный угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как контроллеру точно известно, на сколько был сделан поворот. В связи с этим они часто используются в приводах многих роботов и станках с ЧПУ.
- Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы совершенно отличается: крошечные пьезоэлектрические ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
- Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом, мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных.
- Электроактивные полимеры: Электроактивные полимеры — это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Однако, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все неэффективны или непрочны.
- Эластичные нанотрубки: Это многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет этому волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменен проводом из такого материала диаметром 8 мм. Такие компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.
Используемые технологии
Искусственный интеллект
Свойство механизмов самостоятельно выбирать путь решения для каждой поставленной перед ним задачи, опираясь на информацию базы данных. Важнейший аспект при этом – самообучение, в ходе которого робот разрабатывает программы действий.
ИИ использовались при создании: Deep Blue – анализатора-шахматиста, который сумел обыграть чемпиона мира Каспарова; MYCIN, способного ставить точный диагноз пациенту после оценки состояния его здоровья, а также ViaVoice служащие в качестве консультантов, умеющие поддерживать конструктивный диалог с потребителями.
Навигация
Навигационная бортовая система выполняет несколько функций одновременно:
Наибольший вклад в совершенствование систем навигации внесли компании, разрабатывающие видеоигры. Они инвестировали огромные средства в исследования и разработку соответствующих проектов.
Компьютерное зрение
Технология, наделяющая робота способностью определять, классифицировать объёмные предметы и изображения, распознавать образы. Благодаря этому были созданы устройства, собирающие пазлы и конструкторы Lego, системы видеонаблюдения, 3D-моделирования, виртуальной реальности, индексированные базы изображений.
Вступление
Первый промышленный робот в Японии был произведён полвека назад. В 1968 году компания Kawasaki Heavy Industries подписала лицензионное соглашение с американской венчурной компанией Unimation и начала собственное производство в Японии. Первый японский промышленный робот под названием «Kawasaki-Unimate 2000» был выпущен в 1969 году.
С этого момента производство промышленных роботов, преимущественно сфокусированное на автомобильной промышленности, начало набирать обороты. Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Сегодня промышленные роботы используются не только в автомобильной промышленности, но и при сборке электроники, и в пищевом производстве. Роботы успешно используются для решения многих задач: сварка, покраска, сборка, паллетирование. Для того, чтобы наилучшим способом адаптироваться к каждому типу задачи — промышленные роботы бывают различных типов, различных конструкций и с разными функциями.
Несмотря на большое разнообразие, решаемых роботом, задач, и вариаций конструкции, выделяют 6 основных типов роботов.
Существуют различные способы структуризации промышленных роботов: по размеру, нагрузке, сфере применения. В этой статье мы остановимся на структуризации по типу соединения звеньев робота и механической конструкции.
У роботов могут быть и вращательные и линейные оси. Количество соединений в роботе является количеством осей или степеней свободы (DOF). Количество и типы соединений звеньев робота будет для нас основным фактором, позволяющим нам определить тип робота.
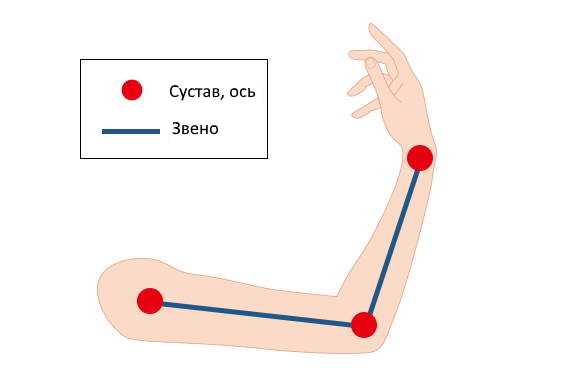
Можно найти много схожего в строении суставов робота и человека. Чаще всего двигатели вращают суставы робота, подобно как мышцы вращают запястье человек или сгибают руку в локте. Но есть и то, что у человека нет – это линейные соединения звеньев робота, позволяющие выдвигать вперёд/назад или верх/вниз сустав робота.
У каждого промышленного робота есть инструмент, который, как правило, крепится на запястье – это может быть сварочная горелка или захват. Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
Проектирование и создание роботов
Проектирование и создание роботов — сложный и многогранный процесс, требующий совместной работы различных специалистов. Основные этапы создания робота включают в себя:
- Анализ потребностей и определение целей. В этой фазе определяются требования к роботу, его функциональные возможности и рабочая среда.
- Проектирование механической конструкции. Разрабатывается внешний вид и геометрия робота, а также определяются принципы его движения и манипулирования объектами.
- Разработка электронных компонентов и схем. Создаются схемы питания, платы управления и сенсоры, необходимые для работы робота.
- Программирование. Написание программного обеспечения робота, которое позволяет ему выполнять заданные функции и взаимодействовать с внешним окружением.
- Сборка и тестирование. Этап, на котором происходит физическое соединение всех компонентов робота и проверка его работоспособности.
Создание роботов требует учета множества факторов, таких как назначение, среда эксплуатации, требования к безопасности и бюджет. Команда разработчиков может состоять из инженеров механики, электротехники, программистов и специалистов по искусственному интеллекту.
Процесс создания роботов может быть длительным и трудоемким, однако результатом является создание уникальных устройств, способных выполнять различные задачи и автоматизировать трудоемкие процессы.
Пример команды разработчиков робота
Специализация
Задачи
Механическое проектирование
Разработка внешнего вида, анатомии и движений робота
Электротехника и электроника
Создание плат управления, схем питания и сенсоров
Программирование
Написание программного обеспечения робота
Искусственный интеллект
Разработка алгоритмов и моделей поведения робота
В итоге, успешное проектирование и создание роботов требует командной работы и инженерной осведомленности в различных областях техники и науки.
История роботов: от автоматонов до ИИ
Концепция создания искусственных существ, способных
самостоятельно выполнять задачи, была частью истории человечества на протяжении
тысячелетий. Хотя термин «робот» может вызвать по ассоциации образы современных
высокотехнологичных заводов или автономных автомобилей, само явление гораздо
старше термина.
![С чего начать саморазвитие: 20 советов [пошаговый план + разбор ошибок]](https://grandcapital73.ru/wp-content/uploads/f/5/f/f5f9d2f8b3291047016841fee14a0ff7.jpeg)







Самые ранние примеры того, что можно считать
предшественниками роботов, можно проследить в Древней Греции и Египте, где для
выполнения определенных задач создавались механические статуи, приводимые в
движение водой, паром или сложными системами передач. Эти устройства были, в
некотором смысле, автоматами: самодействующими машинами, предназначенными для
выполнения заранее определенных инструкций.
В XVIII
и XIX веках произошла
промышленная революция, в ходе которой машины стали в значительных масштабах
заменять человеческий труд. Ткачество, шитье и другие ручные работы стали
автоматизированными, что привело к новой эре производства. Несмотря на то, что
эти машины были далеко не автономными, они заложили основу для будущего
развития робототехники.
Термин «робот» был впервые введен в 1920 году чешским
драматургом Карелом Чапеком в его пьесе «R.U.R.» (Универсальные роботы Россума).
Слово «робот» произошло от чешского слова «robota», означающего принудительный
труд, и в пьесе роботы в конечном итоге подняли восстание против своих
создателей-людей, к этой теме часто возвращаются в современной научной
фантастике.
Реальный мир начал догонять фантастику в середине XX века. В 1950-х и 60-х
годах появились первые по-настоящему автономные машины.
По мере развития технологий робототехника начала
интегрироваться с информатикой, что привело к появлению области искусственного
интеллекта (ИИ). В 1980-х и 90-х годах были разработаны роботы, способные
выполнять сложные задачи. Робототехника начала находить применение в различных
областях, таких как медицина, военное дело, освоение космоса и даже домашнее
хозяйство.
В начале XXI
века робототехника совершила очередной скачок вперед благодаря внедрению
машинного обучения и передовых алгоритмов искусственного интеллекта. Теперь
роботы смогли не только выполнять запрограммированные инструкции, но и учиться
на собственном опыте и адаптироваться к новым ситуациям.
Современные роботы варьируются от физических объектов, таких
как промышленные роботы и автономные транспортные средства, до программных
роботов, таких как чат-боты и виртуальные помощники. Развитие искусственного
интеллекта и машинного обучения продолжает расширять границы их возможностей.